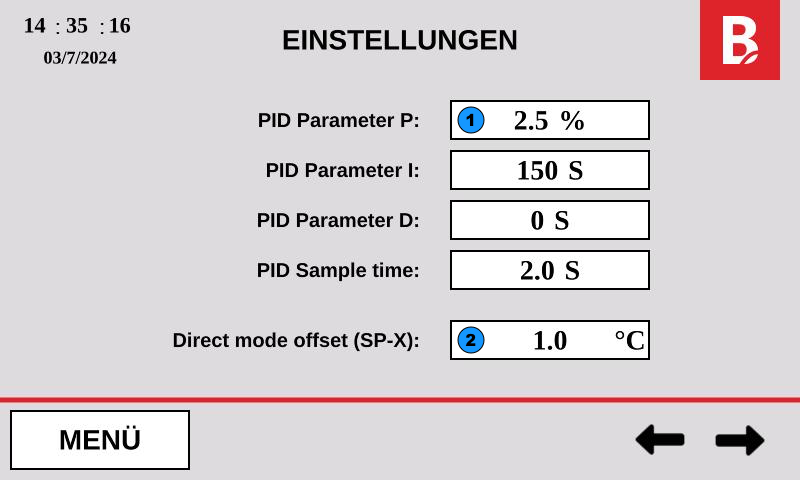
1) PID:
Le régulateur PID assure que la température cible dans la cuve de brassage est atteinte et/ou maintenue aussi précisément que possible en contrôlant l'intermittence des résistances en marche / arrêt. Il utilise des parties proportionnelles, intégrales et différentielles pour corriger rapidement et précisément les écarts par rapport à la température cible et garantir des conditions de température stables.
Le Paramètre P (partie proportionnelle) détermine la réaction du régulateur à l'écart actuel par rapport à la consigne. Il garantit que la grandeur régulée est ajustée de manière proportionnelle à la taille de l'écart, une plus grande différence entraînant une correction plus forte.
Le Paramètre I (partie intégrale) prend en compte la somme des écarts passés dans le temps. Il garantit que même de petits écarts constants sont compensés en ajustant progressivement la grandeur régulée pour atteindre à long terme la consigne et éliminer les écarts réguliers persistants.
Le Paramètre D (partie différentielle) réagit au taux de changement de l'écart par rapport à la consigne. Il garantit que la grandeur régulée est ajustée en fonction de la vitesse et de la direction du changement de l'écart, ce qui aide à réduire les oscillations et à stabiliser le système plus rapidement.
2) Décalage du mode direct:
Dans le mode de chauffage direct, cela entraîne l'arrêt du chauffage lorsque :
Valeur mesurée == Valeur consigne - Décalage
Ce qui devrait empêcher un "dépassement" de la température cible.